
ADEX - Autonomous Driving Examiner
Kurzbeschreibung
Intelligente Mobilität durch hoch-automatisierte Fahrzeugen ist eine wichtige Priorität in unserer modernen Gesellschaft, mit dem großen Versprechen, sowohl die Zahl der Verkehrsunfälle und Todesopfer als auch die Umweltverschmutzung drastisch zu reduzieren. Es ist aber auch eine der großen technologischen Herausforderungen der heutigen Zeit.
Obwohl in den letzten Jahren bereits viele Fortschritte erzielt wurden, zeigen Unfälle mit automatisierten Fahrzeugen deutlich die Schwächen des aktuellen Standes der Technik. Der Einsatz von Komponenten des maschinellen Lernens und der Betrieb automatisierter Fahrzeuge in komplexen Umgebungen, die Fußgänger, Radfahrer und menschliche Fahrer einschließen, führen zu großen Sicherheitsbedenken. Daher stellt sich die Frage: werden wir jemals in der Lage sein, automatisiert fahrenden Controllern vollständig zu vertrauen?
Um das zu beantworten, kann zunächst untersucht werden, wie die Gesellschaft Vertrauen zu menschlichen Fahrern fasst: diese müssen ihre Fähigkeiten vor einem Fahrprüfer unter Beweis stellen, bevor sie selbständig fahren dürfen.
Die Fahrprüfung besteht aus einem großen Satz realistisch simulierter Verkehrssituationen, Szenarien genannt, mit Modellen für das menschliche Verhalten für Fußgänger, Radfahrer und Fahrer anderer Fahrzeuge, sowie für verschiedene Wetter- und Straßenbedingungen.
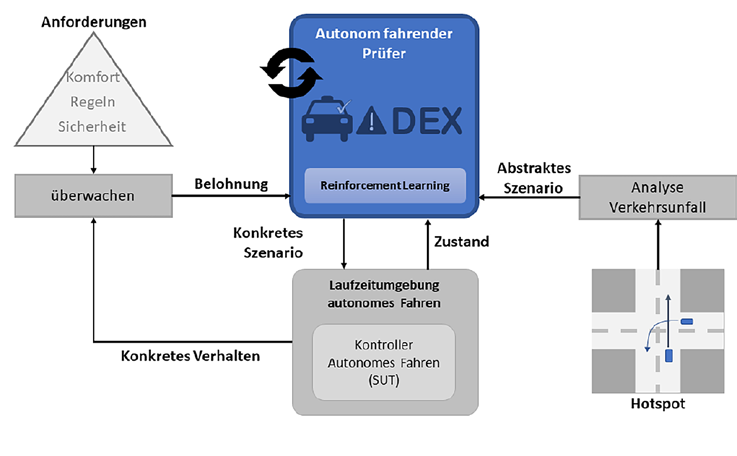
Diese Szenarien werden sowohl Situationen mit normalen Verkehrsbedingungen als auch herausfordernde Edge-Case-Szenarien enthalten, die es ermöglichen, versteckte Probleme aufzudecken. Sowohl das Konzept eines autonomen Prüfers für automatisiertes Fahren als auch die Art und Weise, wie wir den Prüfer synthetisieren, sind höchst innovativ. Die Architektur der vorgeschlagenen Lösung ist in Abbildung 1 dargestellt:
- Die realen Verkehrsunfälle werden mittels ganzheitlicher Unfallanalyse an Unfallhäufungsstellen (Hotspots) untersucht und dazu verwendet, synthetisch neue, realistische und kritische Verkehrsszenarien und Fahrsequenzen für die Prüfung zu erzeugen.
- Aktionen des automatisiert fahrenden Controllers werden sorgfältig in Form von Belohnungen quantifiziert, die durch Reinforcement-Learning-Techniken beitragen, immer komplexere Verkehrssituationen zu generieren.
- Um das Verhalten des automatisiert fahrenden Controllers zu bewerten und die Belohnungen entsprechend zu gestalten, berücksichtigen wir mehrere Kriterien, einschließlich Sicherheit, Verkehrsregeln, ethische Belange der Entscheidungsfindung und Komfort der Passagiere.
In Analogie zum menschlichen Fahrer, werden wir als Gesellschaft mehr Vertrauen in die Zuverlässigkeit solcher Systeme aufbauen und eher geneigt sein, automatisiert fahrende Controller auf unseren Straßen zu akzeptieren, wenn diese derartige Prüfungen bestehen. Andererseits wird ein Nichtbestehen der Prüfung noch vorhandene Probleme im autonomen Fahren aufdecken und den Ingenieur:innen wertvolle Informationen zur Verbesserung liefern.
Projektbeteiligte
Konsortialführung
AIT Austrian Institute of Technology GmbH
Weitere Konsortialpartner:innen
- AVL List GmbH
- Technische Universität Wien
- SV Univ.-Prof. DI Dr. Ernst PFLEGER
Kontaktadresse
AIT Austrian Institute of Technology GmbH
Dr. Dejan Ničković
Giefinggasse 4
1210 Wien