
iLIDS4SAM - Integrated LiDAR Sensors for Safe&Smart Automated Mobility
Kurzbeschreibung

Aktuelle Fahrerassistenzsysteme fokussieren auf vergleichsweise einfache Szenarien in denen sich Objekte vorhersagbar verhalten, wie Autobahnverkehr oder Parkassistenz ohne Fußgänger:innen, Radfahrer:innen oder Querverkehr. Automatisierte Mobilitätsysteme müssen aber auch komplexere Stadtverkehrsszenarien erkennen.
Ziel ist es, ein leistungsfähiges und kostengünstiges Laser-Sensorsystem mit einem „Deep Learning" Datenmanagement zu entwickeln.
Damit automatisierte Fahrzeuge die Umgebung umfassend wahrnehmen können, wird ein dreidimensional sehendes Auge entwickelt. Neuartige und kompakte Lidar-Sensorsysteme sollen ein größeres Sichtfeld mit hoher Präzision bieten.
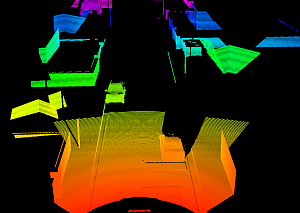
Lidar steht für „Light Detection and Ranging" und bedeutet so viel wie Lichterkennung und Reichweitenmessung. Dabei scannt ein Laserstrahl mithilfe von Mikrochip-Spiegeln das Umfeld millimetergenau, horizontal und vertikal ab. Gemessen wird nicht nur der Abstand, sondern auch die Form von Objekten. Das Ergebnis ist ein dreidimensionales Bild von sich bewegenden Fahrzeugen oder Fußgängern und Fußgängerinnen, Verkehrszeichen, Hindernissen am Straßenrand oder auch von Fahrbahnmarkierungen.

Um die Sensoren kompakt, robust und voll integrierbar zu gestalten, müssen die dazugehörigen Komponenten, die Verbindungstechnologien und auch das Spiegel-Design optimiert und weiter miniaturisiert werden. Die Sensoren werden beispielsweise hinter der Windschutzscheibe, im Scheinwerfer oder in den Rückleuchten eingebaut und in Kombination mit Radar- oder Kamerasystemen einen 360 Grad Rundumblick bieten.
Für das sichere, selbstständige Agieren ist die Sammlung, Auswertung und vor allem blitzschnelle Verarbeitung von Daten grundlegend. Wichtiger Teil des Projektes sind daher Testfahrten in realen Anwendungsszenarien.
Damit wird eine große Menge an realen Daten gesammelt, um dann mittels Signalverarbeitungsalgorithmen das Verhalten vorherzusagen und eine Gefahreneinschätzung ableiten zu können.
Big Data sowie künstliche Intelligenz machen das Fahrzeug der Zukunft quasi zur „Lernmaschine", um sich kontinuierlich zu verbessern und zu optimieren.
Als erster Meilenstein wurde ein Datenmanagementplan implementiert, der mit der Open Source Plattform des europäischen Forschungszentrum CERN verbunden ist. So wird ein öffentlich zugänglicher Datenpool geschaffen, auf dessen Basis weitere Forschungsprojekte, Entwicklungen und Verbesserungen aufsetzen können.
Projektbeteiligte
Projektkoordinator:innen
Infineon Technologies Austria AG
Projektpartner:innen
- AVL List GmbH
- ams AG
- EV Group E.Thallner GmbH
- TTTech Computertechnik AG
- Technische Universität Graz
- Virtual Vehicle Research GmbH
- FH Campus Wien Forschungs- und Entwicklungs GmbH
- RIEGL Research Forschungsgesellschaft mbH
- Silicon Austria Labs GmbH
- IDeAS GmbH & Co KG
Kontaktadresse
Infineon Technologies Austria AG
Babenbergerstraße 10
A-8020 Graz