iLIDS4SAM - Integrated LiDAR Sensors for Safe&Smart Automated Mobility
Short Description

Current driver assistance systems focus on comparatively simple scenarios in which objects behave predictably, such as motorway traffic or parking assistance without pedestrians, cyclists or cross traffic. Automated mobility systems also need to identify more complex urban transport scenarios.
The goal is to develop a high-performance and cost-effective laser sensor system with "deep learning" data management.
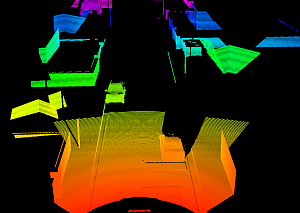
A three-dimensional eye is being developed to enable automated vehicles to fully perceive the environment. Novel and compact lidar sensor systems are designed to provide a wider field of view with high precision. Lidar stands for "Light Detection and Ranging" and means as much as light detection and range measurement. Using microchip mirrors, a laser beam scans the environment with millimetre precision, horizontally and vertically. Not only the distance, but also the shape of objects is measured. The result is a three-dimensional image of moving vehicles or pedestrians, traffic signs, roadside obstacles or road markings.

In order to make the sensors compact, robust and fully integrated, the associated components, connection technologies and mirror design must be optimized and further miniaturized. For example, the sensors are installed behind the windshield, in the headlights or in the rear lights and, in combination with radar or camera systems, provide a 360 degree panoramic view.
The collection, evaluation and, above all, lightning-fast processing of data is essential for safe, independent operation. An important part of the project are therefore test drives in real-world application scenarios.
This collects a large amount of real data in order to be able to predict the behaviour and derive a hazard assessment by means of signal processing algorithms. Big data and artificial intelligence make the vehicle of the future a "learning machine" to continuously improve and optimize.
As a first milestone, a data management plan was implemented, which is connected to the open source platform of the European research center CERN. This will create a publicly accessible data pool on the basis of which further research projects, developments and improvements can be established.
Project Partners
Project coordinators
Infineon Technologies Austria AG
Project partners
- AVL List GmbH
- ams AG
- EV Group E.Thallner GmbH
- TTTech Computertechnik AG
- Technische Universität Graz
- Virtual Vehicle Research GmbH
- FH Campus Wien Forschungs- und Entwicklungs GmbH
- RIEGL Research Forschungsgesellschaft mbH
- Silicon Austria Labs GmbH
- IDeAS GmbH & Co KG
Contact Address
Infineon Technologies Austria AG
Babenbergerstraße 10
A-8020 Graz